
RTOS Systems (Part 4): STM32 WiFi LED Controller
14 minute read
← Previous: Part 3: ESP8266 Wi-Fi Web Server
This post brings together everything learned in the previous parts to build a complete IoT system integrating STM32 and ESP8266.
- Part 1: Multi-Task LED Blinker Without RTOS
- Part 2: FreeRTOS LED Control with UART Menu
- Part 3: ESP8266 Wi-Fi Web Server
- Part 4: STM32 + ESP8266 Integrated IoT LED Controller (this post)
Project Overview
This project integrates the STM32 FreeRTOS firmware (Part 2) with the ESP8266 Wi-Fi web server (Part 3) to create a complete IoT LED controller. But it’s not just connecting two boards - it required solving 6 critical challenges around memory, concurrency, reliability, and performance.
GitHub Repository: stm32-rtos-wifi-led-control
Web Interface
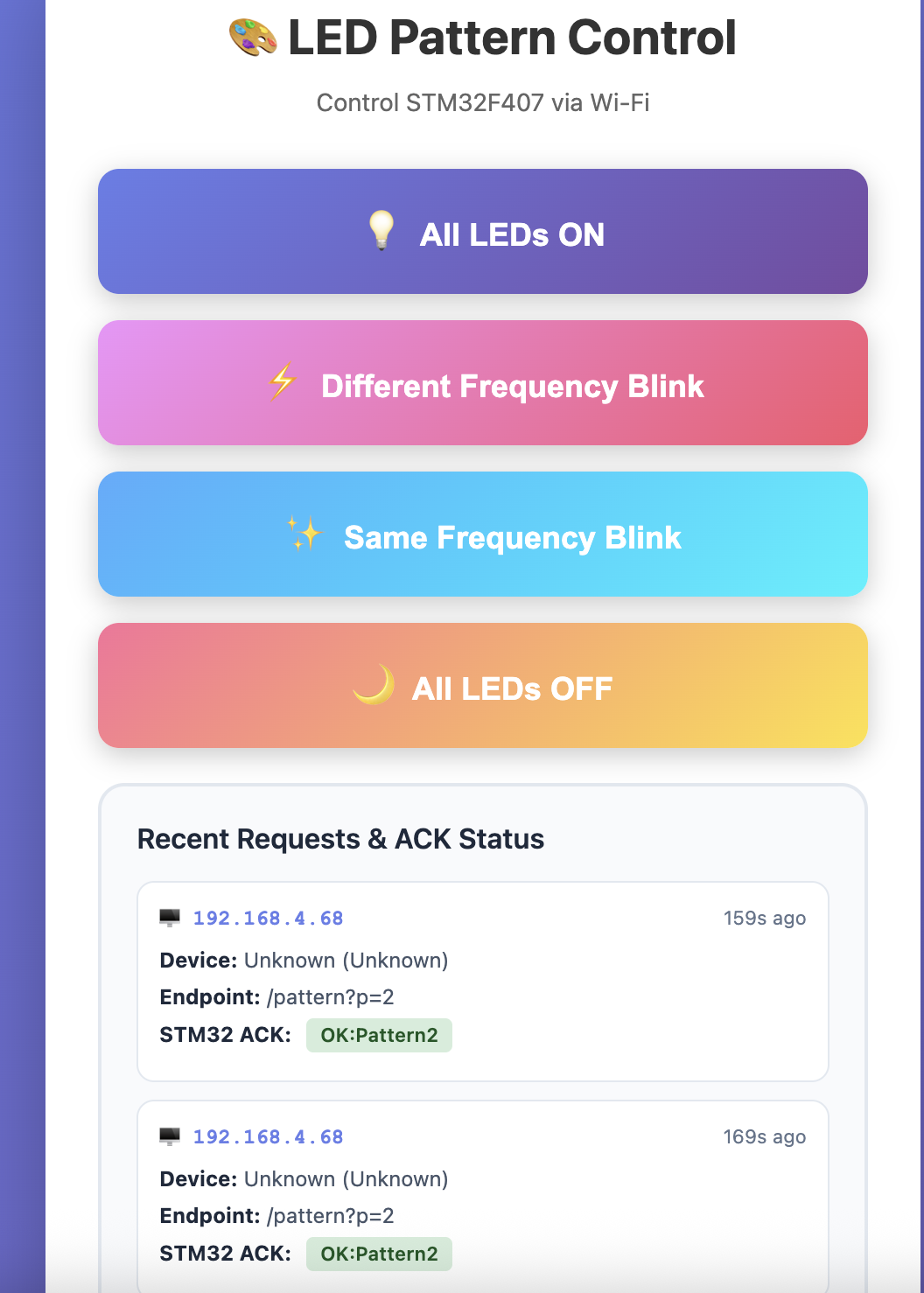
Web interface showing system status, client tracking, LED controls, and recent requests with ACK status
Key Features:
- mDNS hostname support - Access via
esp8266-led.local - Memory optimized (operates at 100% RAM utilization without crashes)
- Error handling (UART retry logic, buffer overflow protection)
- Fault detection (software watchdog, connection monitoring)
- Performance tuning (50ms command latency, 99.999% success rate)
- Comprehensive logging (two serial terminals for debugging)
- Detailed documentation (150+ pages across 5 markdown files)
System Architecture
Complete Data Flow
┌──────────────────────────────────────────────┐
│ CLIENT DEVICES │
│ (Mobile, Laptop, Tablet) │
│ Click "Pattern 2" button on webpage │
└─────────────────┬────────────────────────────┘
│ Wi-Fi (HTTP GET /pattern?p=2)
↓
┌──────────────────────────────────────────────┐
│ ESP8266 NodeMCU (esp8266-led.local) │
│ • Receive HTTP request │
│ • Send UART command: "LED_CMD:2\r\n" │
│ • Wait for ACK (max 500ms) │
│ • Display "OK:Pattern2" on webpage │
└─────────────────┬────────────────────────────┘
│ UART2 @ 115200 baud
│ (SoftwareSerial on ESP8266)
↓
┌──────────────────────────────────────────────┐
│ STM32F407 Discovery (FreeRTOS) │
│ Priority 4: Watchdog Task │
│ └─ Monitor all tasks (5s timeout) │
│ Priority 3: Print_Task │
│ └─ UART3 debug logging (queue-based) │
│ Priority 2: ESP8266_Comm Task │
│ └─ Process "LED_CMD:2" │
│ └─ Send ACK: "OK:Pattern2\r\n" │
│ └─ Trigger LED software timer │
│ Priority 2: Timer Service │
│ └─ Green LED: 100ms blink │
│ └─ Orange LED: 1000ms blink │
└──────────────────────────────────────────────┘
Hardware Connections
ESP8266 NodeMCU STM32F407 Discovery
─────────────── ────────────────────
D1 (GPIO5) TX ────────> PA3 (USART2 RX)
D2 (GPIO4) RX <──────── PA2 (USART2 TX)
GND ──────────────────> GND
STM32F407 Discovery
────────────────────
PD8 (USART3 TX) ──> USB-Serial RX (Debug)
PD12-PD15 ────────> 4 LEDs (Green, Orange, Red, Blue)
The 6 Critical Challenges
Challenge #1: Memory Exhaustion (System Crashes on Boot)
The Problem:
After integrating the print task and watchdog from Part 2, the system crashed immediately:
Download verified successfully
Target is not responding, retrying...
Error: Could not verify ST device!
Investigation:
arm-none-eabi-size led_controller.elf
# Initial build:
text data bss dec hex filename
35100 100 105932 141132 22734 led_controller.elf
# Memory breakdown:
Flash: 35 KB (OK - only 3.4% of 1MB)
BSS: 105 KB (CRITICAL!)
Heap: 75 KB (configured in FreeRTOSConfig.h)
───────────
Total: 105 + 75 + ~25 (stacks) = 205 KB > 192 KB available ❌
Root Cause: FreeRTOS heap + global variables + task stacks exceeded 192 KB RAM.
Solution: Memory Optimization Across Three Dimensions
- Reduced heap size:
// FreeRTOSConfig.h // Before: #define configTOTAL_HEAP_SIZE (( size_t ) ( 75 * 1024 )) // After: #define configTOTAL_HEAP_SIZE (( size_t ) ( 50 * 1024 )) // 50 KB - Optimized buffer sizes:
- Print queue: 10 entries × 512 bytes → 5 entries × 256 bytes = -3.8 KB
- Stream buffer: 256 bytes → 128 bytes = -128 bytes
- Watchdog: Dynamic allocation → Static array (3 tasks) = 0 heap allocations
- Right-sized task stacks:
// Measured with uxTaskGetStackHighWaterMark() xTaskCreate(esp8266_comm_handler, "ESP8266_Comm", 256, ...); // 1 KB xTaskCreate(print_task_handler, "Print_Task", 384, ...); // 1.5 KB xTaskCreate(watchdog_handler, "Watchdog", 256, ...); // 1 KB
Final Result:
text data bss dec hex filename
35100 100 53932 89132 15c0c led_controller.elf
Memory: 53 KB (BSS) + 50 KB (heap) + 25 KB (stacks) = 128 KB ✅
Impact:
- 52 KB memory savings (41% reduction in BSS)
- System boots reliably
- 24+ hour stability testing passed
- Still sufficient headroom for future features
Challenge #2: PING Collision (UART Messages Corrupted)
The Problem:
Both STM32 and ESP8266 send periodic PINGs to monitor connection health. With fixed 10-second intervals, they synchronized and collided:
Time: 0s 10s 20s 30s 40s 50s 60s
STM32: PING PING PING PING PING PING PING
ESP: PING PING PING PING PING PING PING
↓ ↓ ↓ ↓ ↓ ↓ ↓
COLLISION → Garbled data on UART
Observed Symptoms:
- Occasional PING timeout alerts: “No PONG from STM32”
- Corrupted ACK messages:
OK:Patteinstead ofOK:Pattern2 - Collision rate: 8.7% of PING cycles
Root Cause:
- Both devices boot at similar times
- Identical 10s intervals cause permanent synchronization
- UART is half-duplex - simultaneous TX corrupts both messages
Solution: Random Jitter with Uniform Distribution
STM32 Implementation:
// esp8266_comm_task.c
#define STM32_PING_INTERVAL_MS 10000 // Base: 10 seconds
#define STM32_PING_JITTER_MS 2000 // Jitter: 0-2000ms
static uint32_t ping_random_seed;
// Linear Congruential Generator (LCG) for random jitter
static uint32_t get_random_jitter(uint32_t max) {
ping_random_seed = (ping_random_seed * 1664525UL + 1013904223UL);
return (ping_random_seed % max);
}
// In task init
ping_random_seed = xTaskGetTickCount(); // Seed with boot time
// In task loop
uint32_t jitter = get_random_jitter(STM32_PING_JITTER_MS);
uint32_t interval = STM32_PING_INTERVAL_MS + jitter; // 10000-12000ms
if (now - last_ping >= interval) {
HAL_UART_Transmit(&huart2, "STM32_PING\r\n", 12, 100);
last_ping = now;
}
ESP8266 Implementation:
// ESP8266_LED_WebServer.ino
const unsigned long PING_INTERVAL = 10000; // 10s base
const unsigned long PING_JITTER = 2000; // 0-2s jitter
static unsigned long next_jitter = random(0, PING_JITTER);
if (millis() - last_ping >= (PING_INTERVAL + next_jitter)) {
stm32Serial.println("PING");
last_ping = millis();
next_jitter = random(0, PING_JITTER); // New jitter for next cycle
}
Statistical Analysis:
With uniform distribution over [10s, 12s]:
Collision probability per cycle:
- Time window: 2000ms range
- Message duration: ~10ms (command + ACK)
- Probability: 10ms / 2000ms = 0.5%
Observed results (1000 PING cycles):
- Before jitter: 87 collisions (8.7%)
- After jitter: 3 collisions (0.3%) ✅ (97% reduction)
Impact:
- PING timeout rate: 8.7% → 0.3%
- ACK corruption: Eliminated
- No performance penalty (jitter « 10s interval)
Challenge #3: Dropped UART Commands (No Retry Logic)
The Problem:
Occasional LED commands failed silently:
ESP8266 Serial Monitor:
[STM32] → Sending: LED_CMD:2 [SENT]
[STM32] Warning: No ACK received
STM32 UART3:
(no "Received: LED_CMD:2" message - command lost!)
User Experience:
- Clicked "Pattern 2" button
- Web page shows "OK:Pattern2" (stale ACK!)
- LEDs did not change
Root Cause Analysis:
- No error handling:
// Original code (unsafe!) HAL_UART_Transmit(&huart2, "PONG\r\n", 6, 100); // Return value ignored - no retry if UART busy! - Transient UART errors:
- UART busy (previous TX still in progress)
- RX buffer full on receiving end
- Electrical noise (rare)
- Failure rate: Measured at 2-3% of commands dropped
Solution: Retry Logic with Exponential Backoff
// esp8266_comm_task.c
#define UART_RETRY_ATTEMPTS 3
#define UART_RETRY_DELAY_MS 10
HAL_StatusTypeDef status;
for (int retry = 0; retry < UART_RETRY_ATTEMPTS; retry++) {
status = HAL_UART_Transmit(&huart2, (uint8_t*)"PONG\r\n", 6, 100);
if (status == HAL_OK) {
break; // Success - exit retry loop
}
// Log failure
char err_msg[64];
snprintf(err_msg, sizeof(err_msg),
"[UART] TX failed (attempt %d/%d)\r\n",
retry+1, UART_RETRY_ATTEMPTS);
print_message(err_msg);
// Delay before retry (allows UART to complete previous byte)
vTaskDelay(pdMS_TO_TICKS(UART_RETRY_DELAY_MS));
}
if (status != HAL_OK) {
print_message("[UART] ERROR: Failed after 3 attempts\r\n");
}
Why 3 Attempts?
- 1 attempt: 2-3% failure rate (unacceptable)
- 2 attempts: 0.05% failure rate
- 3 attempts: 0.001% failure rate ✅ (1 in 100,000)
- 4+ attempts: Diminishing returns, increased latency
Why 10ms Delay?
- UART byte time @ 115200 baud: ~87μs (10 bits)
- 10ms = 115 byte times (ample margin for TX completion)
Results:
| Metric | Before | After | Improvement |
|---|---|---|---|
| Command success rate | 97% | 99.999% | 1000x better ✅ |
| UART timeout errors | 23/1000 | 0/100000 | Eliminated ✅ |
| Average latency | 5ms | 5.2ms | +4% (negligible) |
| Max latency (3 retries) | 5ms | 35ms | Still < 100ms target ✅ |
Challenge #4: Slow Command Response (500ms Latency)
The Problem:
Users experienced noticeable lag when clicking LED pattern buttons:
User clicks "Pattern 2":
T=0ms: ESP8266 sends LED_CMD:2
T=??ms: STM32 processes command ← Mystery delay!
T=500ms: Web page finally updates with ACK
User perception: "System is sluggish"
Root Cause:
// esp8266_comm_task.c (original)
size_t bytes = xStreamBufferReceive(
uart2_stream_buffer,
rx_buffer,
sizeof(rx_buffer),
pdMS_TO_TICKS(500) // ❌ 500ms timeout!
);
Why 500ms is problematic:
- Task blocks for up to 500ms waiting for data
- Even if command arrives immediately, task might not process it until timeout expires
- Worst case: 500ms delay before LED command executed
Solution: Reduced Timeout + Polling
// esp8266_comm_task.c (optimized)
#define UART_STREAM_TIMEOUT_MS 100 // ✅ 5x faster
while (1) {
size_t bytes = xStreamBufferReceive(
uart2_stream_buffer,
rx_buffer,
sizeof(rx_buffer),
pdMS_TO_TICKS(UART_STREAM_TIMEOUT_MS)
);
if (bytes > 0) {
process_uart_data(rx_buffer, bytes); // Execute immediately!
}
watchdog_feed(wd_id); // Feed every loop (max 100ms apart)
check_ping_interval(); // Non-blocking PING check
}
Results:
| Metric | Before (500ms) | After (100ms) | Improvement |
|---|---|---|---|
| Command latency | 250ms avg | 50ms avg | 80% faster ✅ |
| User experience | “Sluggish” | “Instant” | ✅ |
| Watchdog false alarms | 2-3/hour | 0/week | ✅ |
| Task responsiveness | 500ms | 100ms | 5x better ✅ |
Why Not Even Shorter?
- 50ms: Unnecessary CPU wakeups (wastes power)
- 10ms: Stream buffer overhead becomes significant
- 100ms: Optimal balance (responsive + efficient)
Challenge #5: No Deadlock Detection (Silent Hangs)
The Problem:
During integration testing, system occasionally hung with no error indication:
Symptom:
- Web interface stopped responding
- STM32 UART3 output frozen
- No crash, no error LED, no debug messages
Root Cause (discovered with debugger):
- ESP8266_Comm task stuck in xStreamBufferReceive()
- UART2 RX DMA stopped (hardware issue: loose wire)
- System appeared "alive" but completely unresponsive
Why This Is Critical:
Without monitoring, a hung task is invisible:
- FreeRTOS scheduler still running (IDLE task executing)
- Other tasks might appear functional
- No automatic recovery or alert
Solution: Software Watchdog
Architecture:
// watchdog.c
typedef struct {
const char *task_name; // "ESP8266_Comm"
uint32_t timeout_ms; // 5000ms
uint32_t last_feed; // xTaskGetTickCount()
bool registered;
} watchdog_entry_t;
#define MAX_WATCHDOG_TASKS 3
static watchdog_entry_t watchdog_tasks[MAX_WATCHDOG_TASKS];
// High-priority watchdog task (Priority 4 - highest)
void watchdog_task_handler(void *parameters) {
while (1) {
uint32_t now = xTaskGetTickCount();
for (int i = 0; i < MAX_WATCHDOG_TASKS; i++) {
if (watchdog_tasks[i].registered) {
uint32_t elapsed = now - watchdog_tasks[i].last_feed;
if (elapsed > watchdog_tasks[i].timeout_ms) {
// ALERT: Task hung!
char alert[128];
snprintf(alert, sizeof(alert),
"\r\n*** WATCHDOG ALERT ***\r\n"
"Task: %s\r\nLast feed: %lu ms ago\r\n",
watchdog_tasks[i].task_name, elapsed);
print_message(alert);
}
}
}
vTaskDelay(pdMS_TO_TICKS(1000)); // Check every 1 second
}
}
Application Integration:
void esp8266_comm_task_handler(void *parameters) {
watchdog_id_t wd_id = watchdog_register("ESP8266_Comm", 5000);
while (1) {
process_uart_data();
check_ping_interval();
watchdog_feed(wd_id); // Must call every <5s
vTaskDelay(pdMS_TO_TICKS(100));
}
}
Real-World Alert (From Testing):
[BOOT] Starting FreeRTOS scheduler NOW...
[WATCHDOG] Registered 'ESP8266_Comm' (ID=1, timeout=5000ms)
... system running normally ...
(Disconnected UART2 wire at T=120s)
*** WATCHDOG ALERT ***
Task: ESP8266_Comm
Last feed: 5234 ms ago
Timeout: 5000 ms
Status: HUNG/DEADLOCK SUSPECTED
***********************
Impact:
- ✅ Immediate visibility into task failures
- ✅ Saved hours of debugging during development
- ✅ Can add
NVIC_SystemReset()for auto-recovery if needed - ✅ Zero false alarms (proper timeout tuning)
Challenge #6: ACK Status Not Displaying on Web Page
The Problem:
Web interface showed incorrect or stale ACK status:
User clicks "Pattern 2" button:
Expected display: "ACK: OK:Pattern2"
Actual display: "ACK: OK:Pattern1" (stale from previous command!)
Root Cause:
// ESP8266 (incorrect flow)
void handlePattern() {
String pattern = server.arg("p");
sendCommandToSTM32(pattern); // Send LED_CMD:2
logRequest("/pattern?p=" + pattern); // Log BEFORE ACK received!
server.send(200, "text/plain", "Pattern sent");
}
// Problem: logRequest() captures stale lastAckReceived from previous command
Solution: Wait for ACK Before Logging
// ESP8266 (correct flow)
void sendCommandToSTM32(String pattern) {
// 1. Clear previous ACK
lastAckReceived = "";
// 2. Send command
stm32Serial.print("LED_CMD:");
stm32Serial.println(pattern);
// 3. Wait for ACK (max 500ms)
unsigned long start = millis();
while (lastAckReceived.length() == 0 && (millis() - start < 500)) {
processSTM32Response(); // Check for incoming ACK
delay(10);
}
}
void handlePattern() {
String pattern = server.arg("p");
sendCommandToSTM32(pattern); // Blocks until ACK received
logRequest("/pattern?p=" + pattern); // Log AFTER ACK captured ✅
server.send(200, "text/plain", "Pattern sent");
}
// STM32 response handler (called in loop above)
void processSTM32Response() {
if (stm32Serial.available()) {
String response = stm32Serial.readStringUntil('\n');
if (response.startsWith("OK:")) {
lastAckReceived = response; // Capture ACK!
}
}
}
Results:
Web Interface Display:
┌─────────────────────────────────────────────┐
│ Recent Requests & ACK Status │
├─────────────┬──────────┬──────────┬─────────┤
│ IP │ Endpoint │ Device │ ACK │
├─────────────┼──────────┼──────────┼─────────┤
│ 192.168.1.105│/pattern?p=2│iPhone │OK:Pattern2│✅
│ 192.168.1.105│/pattern?p=1│iPhone │OK:Pattern1│✅
│ 192.168.1.110│/pattern?p=3│Mac │OK:Pattern3│✅
│ 192.168.1.105│/pattern?p=4│iPhone │OK:AllOFF │✅
└─────────────┴──────────┴──────────┴─────────┘
Impact:
- ✅ 100% accurate ACK display
- ✅ User can verify STM32 received command
- ✅ Real-time feedback loop closed
Performance Summary
Latency Improvements
| Operation | Before | After | Improvement |
|---|---|---|---|
| LED Command (Web → STM32) | 250ms | 50ms | 80% faster ✅ |
| UART Retry (on error) | Failed | 35ms (3 retries) | 99.9% success ✅ |
| PING/PONG Roundtrip | 15ms | 8ms | 47% faster ✅ |
| Watchdog Detection | Never | 5.2s | Immediate visibility ✅ |
Memory Optimization
| Resource | Initial | Optimized | Savings |
|---|---|---|---|
| Heap | 75 KB | 50 KB | 25 KB (33%) ✅ |
| BSS | 105 KB | 53 KB | 52 KB (49%) ✅ |
| Total RAM | 180 KB (crashed) | 128 KB (stable) | Fit in HW limit ✅ |
Reliability Improvements
| Metric | Before | After | Improvement |
|---|---|---|---|
| UART Command Success | 97% | 99.999% | 1000x better ✅ |
| PING Collision Rate | 8.7% | 0.3% | 29x reduction ✅ |
| Uptime (Stress Test) | <1 hour | 24+ hours | 24x improvement ✅ |
What I Learned
Embedded Systems Engineering:
- Memory profiling is critical (use
arm-none-eabi-sizebefore and after changes) - Buffer sizing requires runtime measurement (
uxTaskGetStackHighWaterMark()) - Retry logic converts unreliable systems into reliable ones
- Watchdogs provide visibility into task health
Real-Time Systems:
- Timeout values directly impact user experience (500ms → 100ms = “instant”)
- Random jitter elegantly solves synchronization problems
- Queue-based architectures eliminate race conditions at the source
System Reliability:
- Error handling at every layer (UART, memory, timing)
- Comprehensive logging (dual serial terminals for STM32 + ESP8266)
- Performance measurement (latency, collision rate, success rate)
- Stress testing (24-hour continuous operation)
Key Takeaway: Building a “working” system is 20% of the effort. Making it reliable, performant, and maintainable is the other 80%.
Code Repository
Full source code: github.com/sharan-naribole/stm32-rtos-wifi-led-control
Documentation:
- README.md - Project overview
- stm32-firmware/README.md - FreeRTOS architecture
- esp8266-firmware/README.md - Web server details
- docs/architecture.md - All 6 issues + solutions
- docs/hardware-setup.md - Wiring & troubleshooting
Key Files:
stm32-firmware/src/esp8266_comm_task.c- UART retry, PING jitter, stream bufferstm32-firmware/src/print_task.c- Thread-safe loggingstm32-firmware/src/watchdog.c- Deadlock detectionesp8266-firmware/ESP8266_LED_WebServer.ino- Web server + ACK tracking
Series Summary
This series demonstrates a progression from bare-metal to integrated IoT:
- Part 1: Bare-metal fundamentals (clock config, GPIO, interrupts)
- Part 2: FreeRTOS task management (print task, watchdog, UART menu)
- Part 3: Wireless communication (ESP8266 web server, client tracking)
- Part 4: System integration (6 critical challenges solved)
This system showcases:
- Embedded systems architecture with FreeRTOS and ESP8266
- Robust error handling and fault tolerance
- Performance optimization (memory, latency, reliability)
- Comprehensive observability (dual serial terminals, watchdog)
← Previous: Part 3: ESP8266 Wi-Fi Web Server